π₀.₅: a Vision-Language-Action Model with Open-World Generalization
论文信息 - 作者:Physical Intelligence (Kevin Black, Noah Brown, James Darpinian, Karan Dhabalia, Danny Driess, 等) - 投稿方向:arXiv 预印本 (2025.04.23) - arXiv ID:2504.16054 - 代码:未开源 - 项目主页:https://pi.website/blog/pi05
一、核心问题
之前的 VLA 模型(如 π₀、RT-2)虽然能执行复杂灵巧任务,但存在一个根本局限:只能在训练数据覆盖的环境中工作。当机器人被部署到全新的家庭环境中(新的厨房布局、新的物体、新的背景),性能会急剧下降。
问题在于:
- 要训练一个能"清理厨房"的移动操作机器人,需要覆盖所有可能的环境——这不可能通过暴力扩大数据收集来实现
- 灵巧操作任务本身就很难,加上环境泛化的要求,难度是指数级的
π₀.₅ 的核心主张是:通过 co-training 从异构数据源中迁移知识,可以让机器人泛化到全新的环境——就像人类能从书本、他人经验、其他领域的技能中综合学习一样。
二、核心思路 / 方法
2.1 总体设计哲学
π₀.₅ 的关键洞察:VLAs 无法仅凭自身的机器人数据泛化到新环境,但可以通过联合训练多种异构数据源获得这个能力。
| 数据源 | 占比 (预训练) | 说明 |
|---|---|---|
| MM (Mobile Manipulator) | ~2.4% | 约 100 个家庭的移动操作数据,约 400 小时 |
| ME (Multi-Environment) | — | 非移动机械臂在更多家庭环境中的数据 |
| CE (Cross-Embodiment) | — | 实验室条件下多机器人多任务数据 + OXE |
| HL (High-Level) | — | 子任务语义标注(如 "pick up the plate") |
| WD (Web Data) | — | 图像描述、VQA、物体定位等网络数据 |
| VI (Verbal Instruction) | 后训练 ~11% | 人类专家用语言"遥控"机器人的示范 |
关键数字:预训练阶段 97.6% 的训练样本不来自移动操作机器人——但模型最终能控制移动机器人在全新家庭中完成任务。
2.2 模型架构
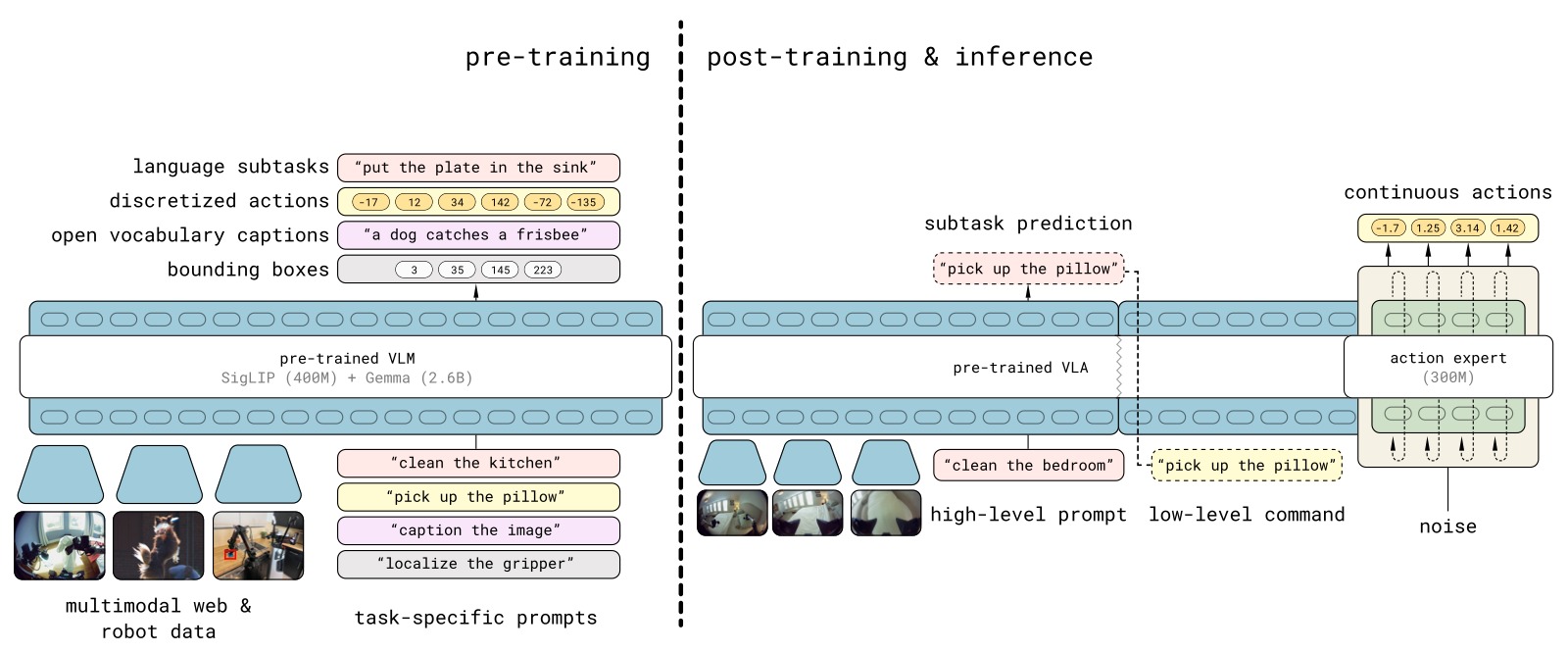
图1:π₀.₅ 的两阶段训练架构。预训练阶段(上):将多种数据源(MM/ME/CE 机器人数据 + HL 高层子任务预测 + WD 网络数据)统一为离散 token 进行训练,行动使用 FAST tokenizer。后训练阶段(下):加入 flow matching 动作专家(action expert),专注于移动操作的连续动作生成,同时保留高层文本输出能力。推理时,模型先预测高层子任务("pick up the plate"),再基于子任务预测低层连续动作。这种设计与 chain-of-thought 类似,但高层推理以较低频率运行。
π₀.₅ 基于 π₀ 的架构,核心设计:
(1) 统一的多模态 Transformer
模型可以灵活地同表示两种输出:
- 文本输出:高层子任务预测(如 "pick up the cutting board")、网络数据的 VQA 答案
- 动作输出:通过 flow matching 生成连续动作 chunk
分布分解为:
其中 $\rawtext$ 是模型文本输出(子任务标签),$\lang$ 是任务指令。
(2) 离散 + 连续的混合动作表示
这是 π₀.₅ 的一个独特设计——模型同时被训练为:
- 通过 FAST tokenizer(DCT+BPE)自回归生成离散 action tokens(预训练阶段,训练效率高)
- 通过 flow matching 非自回归生成连续动作(后训练阶段,推理快)
联合损失函数:
- 第一项:文本 token(含 FAST action tokens)的交叉熵损失
- 第二项:flow matching 动作专家的 MSE 损失($\alpha=10.0$)
(3) 分层推理
推理时:
- 高层:自回归生成子任务文本 $\rawtext$(如 "pick up the plate")
- 低层:基于 $\rawtext$ + 观测,通过 10 步 flow matching 生成连续动作
这与 Hi Robot 类似,但关键区别:同一个模型同时做高层和低层推理(Hi Robot 需要训练两个模型)。
2.3 机器人系统
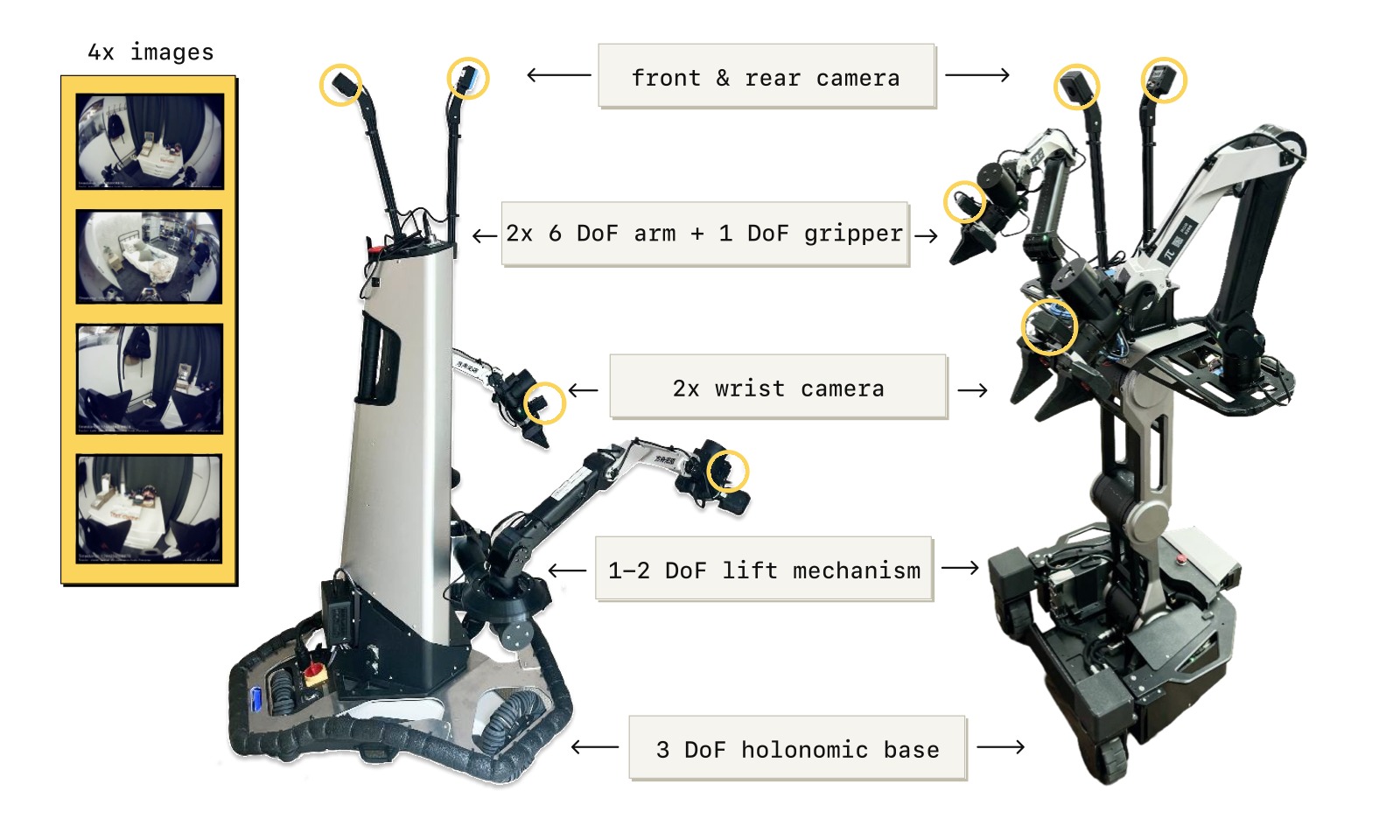
图2:两种移动操作机器人平台。每个平台有 4 个摄像头(前向、后向、两个腕部)、两个 6-DoF 机械臂加平行爪夹爪、全方位移动底盘和躯干升降机构。状态和动作空间为 18-19 维。π₀.₅ 直接以 50Hz 控制关节、夹爪、躯干升降和底盘速度,通过简单的 PD 控制器执行,无需轨迹规划或碰撞检测。
2.4 预训练与后训练数据
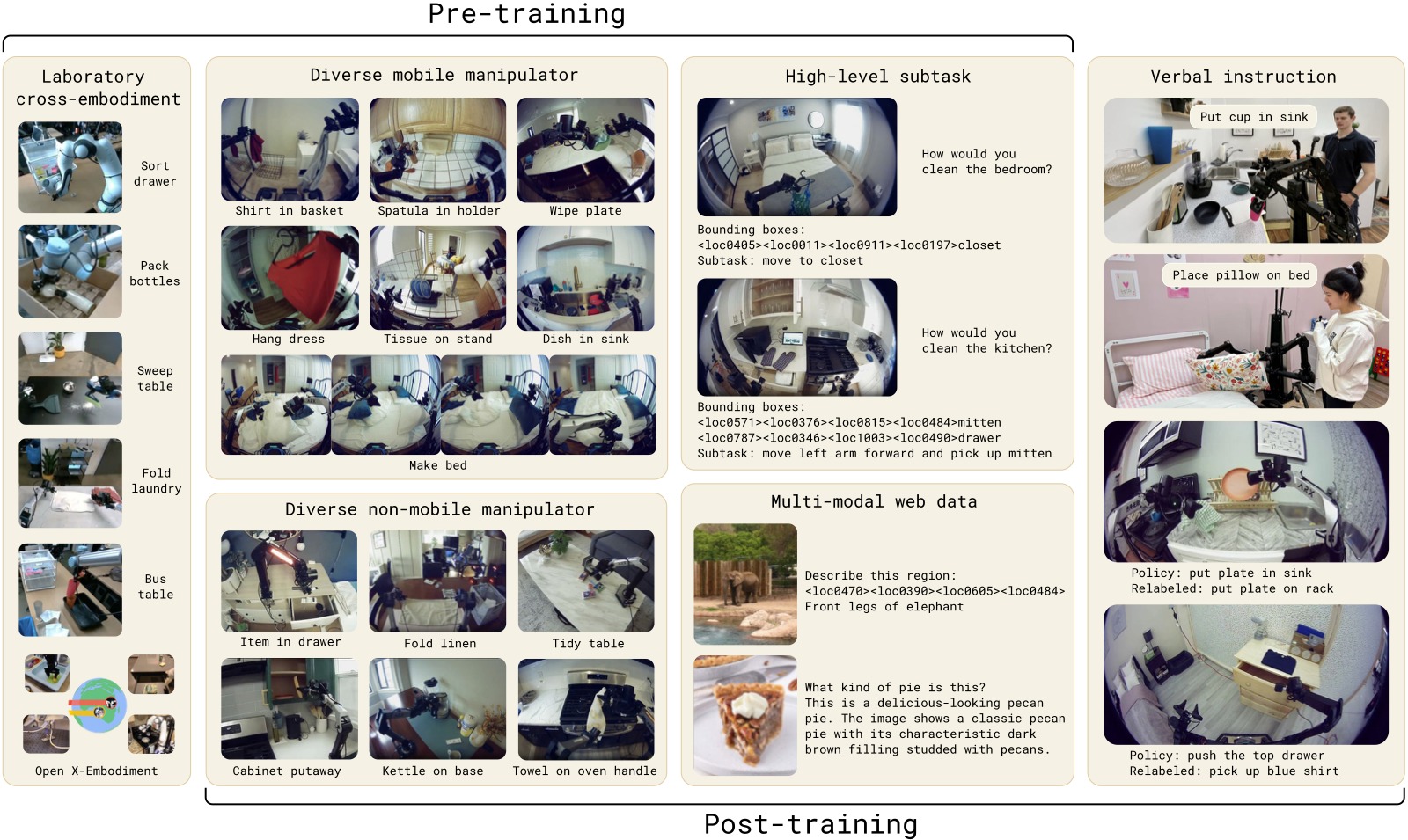
图3:预训练和后训练中各数据源的示例。(MM) 移动操作数据——在约 100 个家庭中执行清洁、整理任务;(ME) 多环境非移动数据——可搬运的轻型臂在更多家庭中收集数据,因轻便而覆盖面更广;(CE) 跨具身实验室数据——在简化桌面环境下多种机器人的多样任务;(HL) 高层子任务预测——手动标注子任务描述和边界框;(WD) 网络数据——图像描述、VQA、物体定位;(VI) 语言指令——人类专家用语言"遥控"机器人的示范数据。后训练阶段去掉了 CE 实验室数据,专注于移动操作和多环境数据。
三、实验与结果
3.1 实验设置
所有评估在训练数据未见过的环境中进行:
- Mock homes:受控的模拟家庭环境(定量比较)
- Real homes:3 个真实家庭(最终评估)
3.2 真实家庭泛化
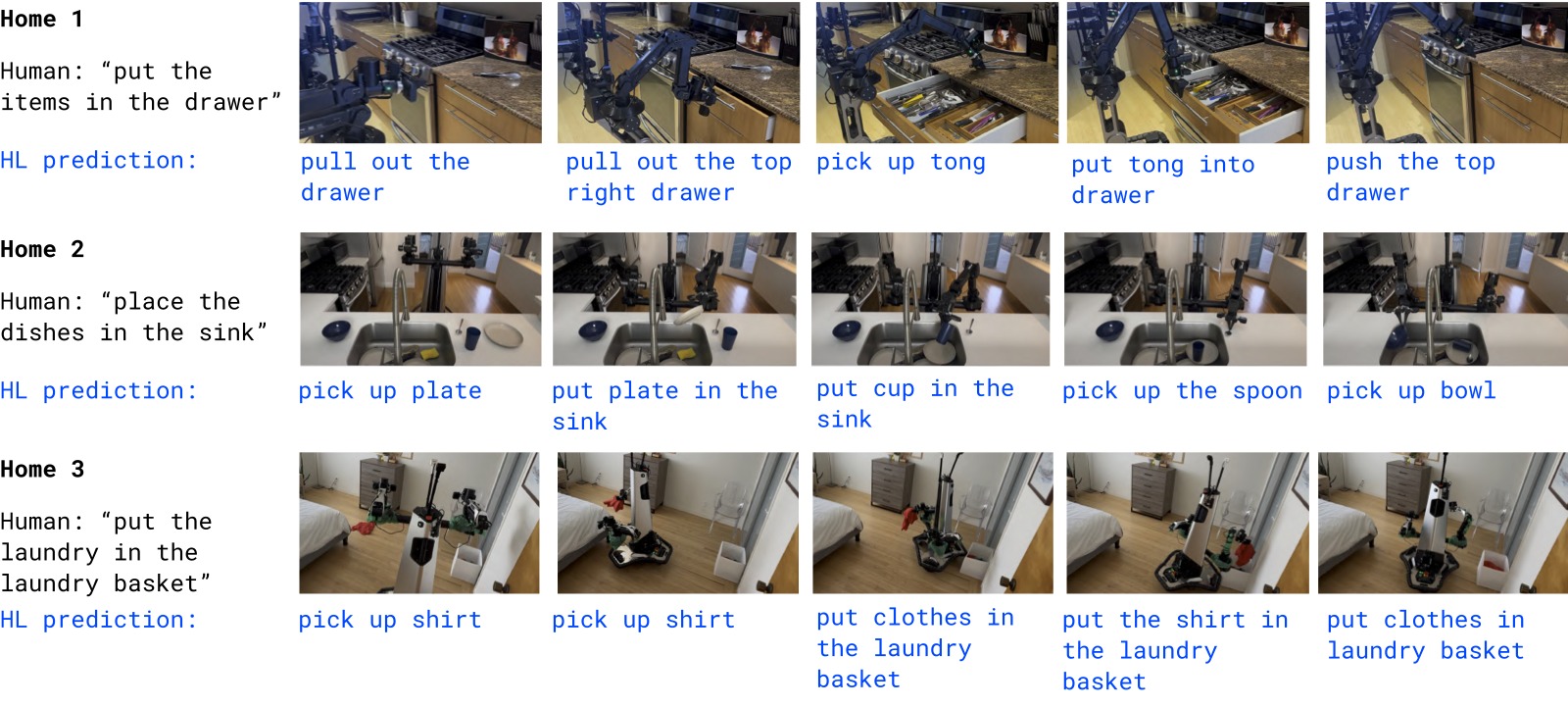
图4:π₀.₅ 在 3 个训练数据中未见过的真实家庭中的评估示例。(a) Home 1——将物品放入抽屉;(b) Home 2——将盘子放入水槽;(c) Home 3——将衣物放入洗衣篮。每帧下方蓝色文字是 π₀.₅ 自行推理的高层子任务标签。所有任务只需一个简单的高层指令(如 "place the dishes in the sink"),高层推理过程自主决定具体步骤。任务持续 2-5 分钟,涉及多阶段操作。
图5:真实家庭中的量化任务进度(10 次试验平均)。三个任务(items in drawer、laundry basket、dishes in sink)在 3 个真实家庭的厨房和卧室中评估。π₀.₅ 在所有任务-环境组合上均取得一致的进展,且 mock 评估环境中的性能与真实家庭性能代表性高度相关。论文指出模型实际能执行的远不止这 3 个评估任务。
3.3 环境数量对泛化的影响
图6:训练数据中环境数量(横轴,从 3 到 104 个)对任务性能(纵轴,dishes in sink、items in drawer、laundry basket、make bed 四项平均)的影响。性能随环境数量单调递增。绿色虚线和绿色柱为"对照组"——在测试环境中直接训练——π₀.₅ 的 104-环境模型已达到与其相似的性能,证明泛化几乎弥合了 gap。浅黄色柱(无 full co-training recipe,仅用机器人数据)和浅绿色柱(同样无 co-training)的性能远低于完整方法,证明异构数据 co-training 对泛化至关重要。
图7:语言跟随率(左)和任务成功率(右)随训练环境数量的变化。分别测试分布内(in-distribution)和分布外(OOD)物体类别。横轴为训练环境数量(3~104),纵轴为成功率。关键发现:(1) 性能随环境数量稳步提升;(2) 分布内物体泛化更快(熟悉类别的新实例);(3) 分布外物体(完全未见类别)的泛化需要更多环境,但随环境数增加也能持续提升——每个新环境引入的新家居物品帮助模型变得更鲁棒。
3.4 Co-training Recipe 消融
图8:消融不同训练数据源对模拟家庭四项任务性能的影响。移除任何数据源都会降低性能:(1) no WD——去除网络数据,影响相对较小但统计不显著;(2) no ME——去除多环境非移动数据,大幅降低性能;(3) no CE——去除跨具身实验室数据,同样大幅降低;(4) no ME or CE——同时移除两个跨具身数据源,性能下降最严重。这证明跨具身迁移(来自不同机器人和不同环境的数据)对泛化至关重要。
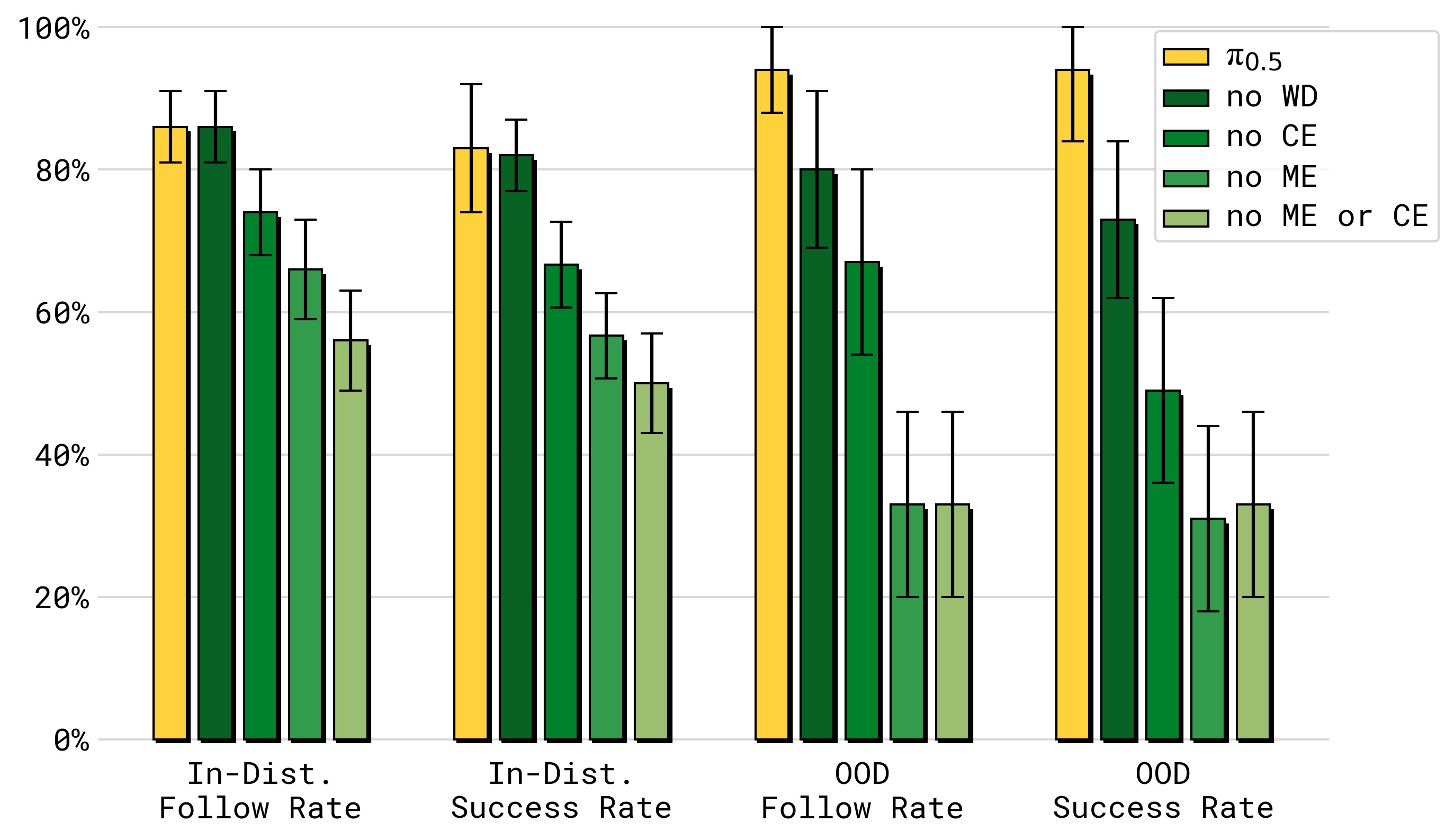
图9:消融实验在语言跟随任务上的表现(分布内 vs 分布外物体)。与完整任务消融一致,ME 和 CE 数据对两种分布都有巨大影响。但这里一个关键区别浮出水面:web data (WD) 对分布外(OOD)物体的语言跟随有显著贡献——去除 WD 后 OOD 性能显著下降。原因:网络数据包含极其广泛的物理物体知识,使模型能理解和遵循涉及未见物体类别的语言指令。
3.5 与 π₀ 及 π₀-FAST 的对比
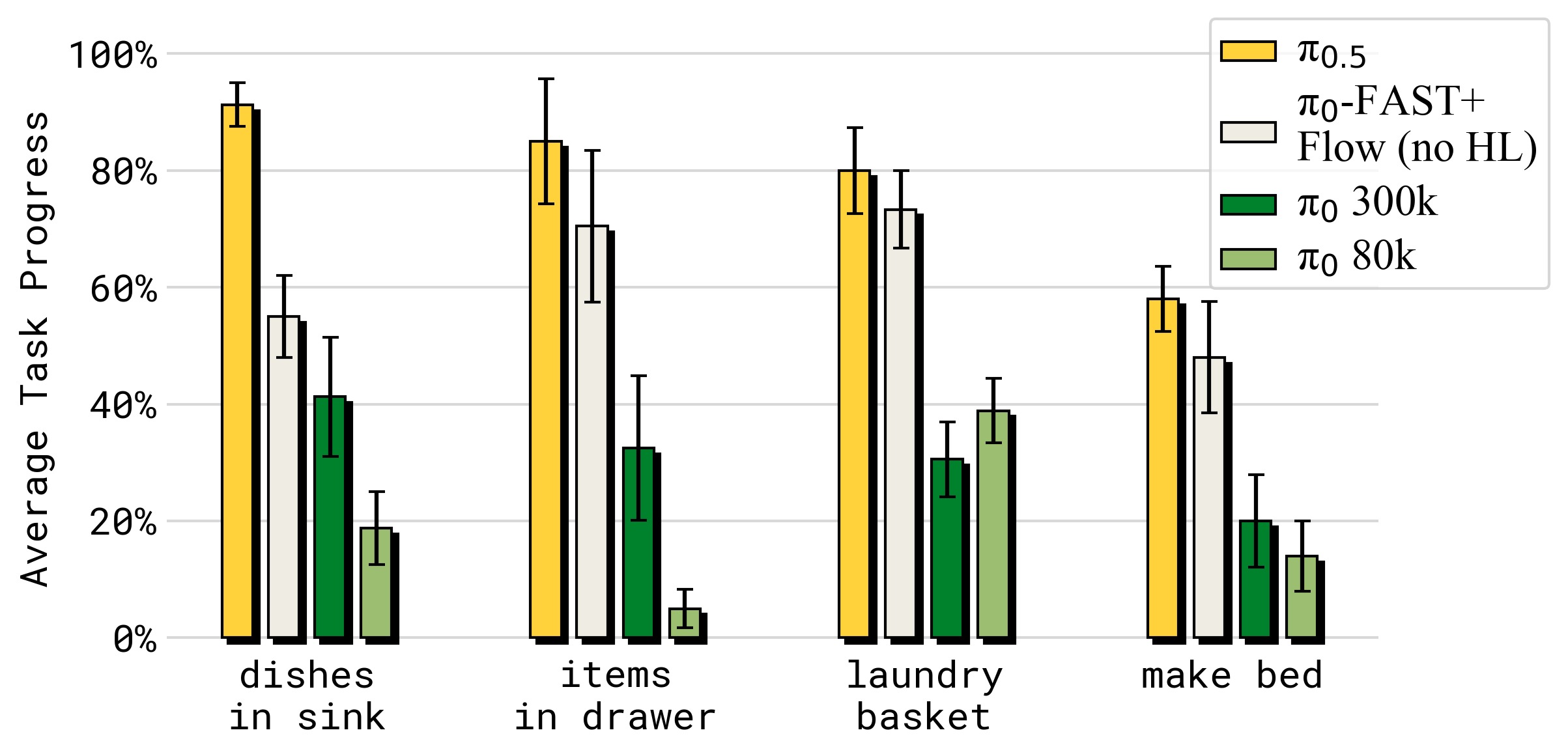
图10:π₀.₅ 与 π₀(原始扩散 VLA)及 π₀-FAST+Flow(改进版,使用联合 FAST+Flow 训练但仅含动作数据)的对比。π₀.₅ 在所有指标上显著优于两者:(1) vs π₀——即使给 π₀ 额外的 300k 步训练,π₀.₅ 仍大幅领先;(2) vs π₀-FAST+Flow——该改进版与 π₀.₅ 使用相同的训练效率优化,但不含 HL 和 WD 数据,性能差距证明高层推理和网络数据 co-training 的价值。
3.6 高层推理的重要性
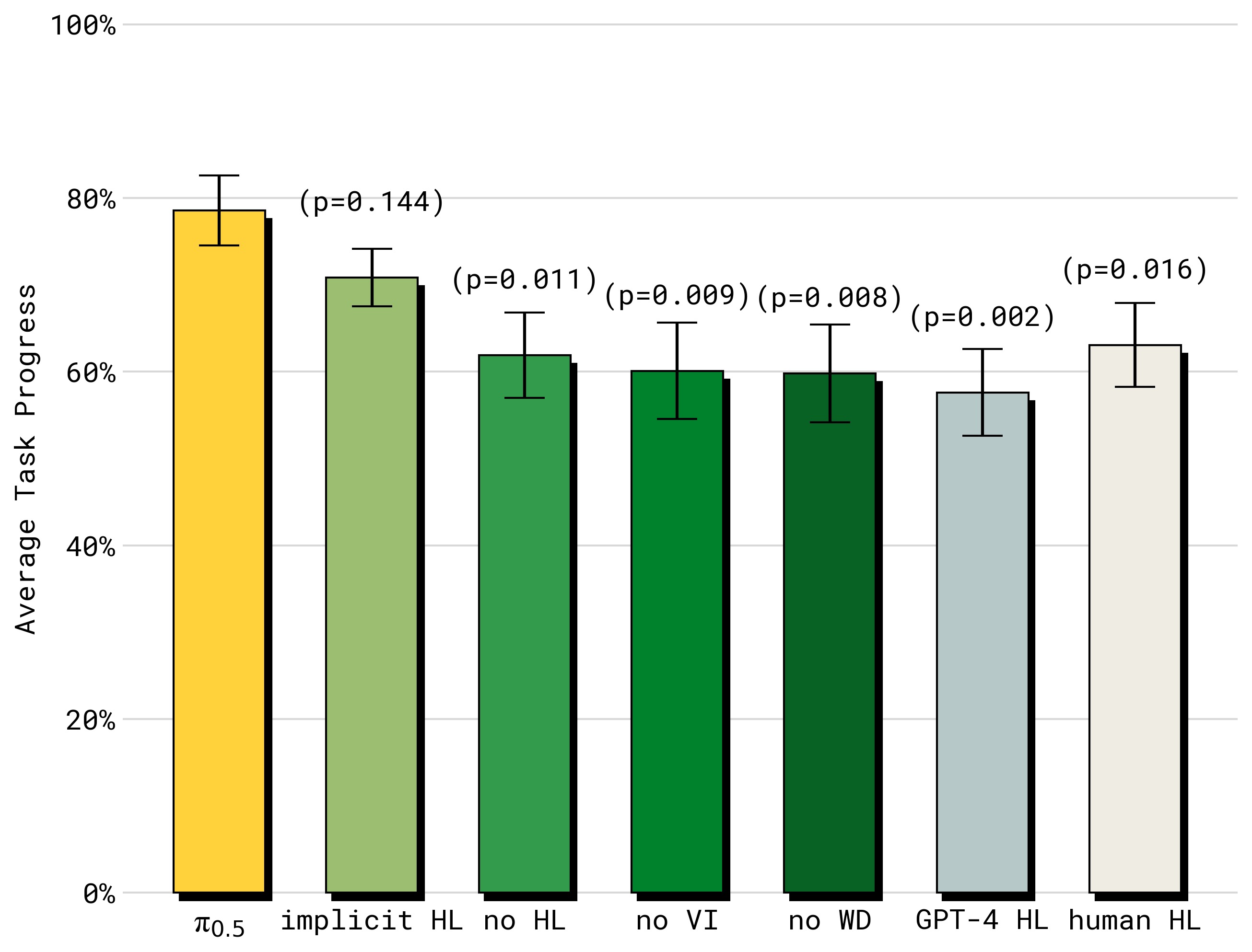
图11:高层推理模式的消融结果。(1) Full π₀.₅ (HL+LL)——最优;(2) implicit HL——不做显式高层推理但训练中包含 HL 数据,排名第二——证明即使不做显式子任务推理,子任务预测数据本身就是强大的 co-training 信号;(3) no VI——去除语言指令数据(仅占 HL 数据的 11%),性能大幅下降——少量的高质量语言交互数据价值极高;(4) no WD——去除网络数据,显著下降——网络数据主要贡献在高层推理能力;(5) no HL——完全不使用 HL 数据,最差之一;(6) GPT-4 高层——使用 GPT-4 作为高层策略(zero-shot),效果最差——证明高层策略必须在机器人数据上微调。有趣的是,π₀.₅ Full 甚至超越了 Human HL(人类专家选择子任务)——说明模型的高层推理不仅跟上了人类水平,还更胜一筹。
四、关键洞察与技术亮点
4.1 "不到 3% 的数据决定一切"
π₀.₅ 预训练中 97.6% 的训练样本不来自移动操作机器人,但模型最终能控制移动机器人在新家庭中工作。这验证了"知识迁移"的力量——通过正确的 co-training 配方,少量高质量目标域数据足以让模型泛化。
4.2 离散 + 连续混合训练
同时训练 FAST 离散 token 和 flow matching 连续动作,兼顾了训练效率(离散 token 的简单交叉熵)和推理速度(flow matching 的 10 步非自回归解码)。预训练用离散($\alpha=0$),后训练加入连续动作专家($\alpha=10.0$)。
4.3 高层子任务预测作为 co-training 信号
即使不做显式的高层推理(implicit HL ablation),仅将子任务预测作为训练目标就大幅提升了性能。这说明子任务标注扮演了类似于 chain-of-thought 监督的角色——教模型"思考"任务结构。
4.4 Web Data 的"双面性"
- 对低层动作执行贡献不大(no WD 在完整任务中影响不显著)
- 对语言跟随(OOD 物体)和高层推理贡献巨大
- 结论:网络数据主要通过语义理解路径影响泛化,而非物理技能
4.5 同模型高层+低层推理
与 π₀-HiRobot(训练两个独立模型)不同,π₀.₅ 使用单一模型同时完成高层推理和低层执行。这更类似于 LLM 的 chain-of-thought——通过内部文本生成实现"思考",然后基于思考结果行动。
五、局限性
- 仍有失败:不熟悉的抽屉把手、物理上难以打开的柜门、遮挡导致的感知失败、高层推理偶尔"分心"(如反复开关抽屉)
- 提示复杂度有限:模型处理的提示相对简单,更复杂的偏好和约束需要通过更丰富的标注数据来实现
- 缺乏长期记忆:模型使用相对短的上下文,无法在跨房间导航或记忆物品位置等场景中表现更好
- 特定的数据组合:论文只探索了一种异构数据组合,其他可能的数据源组合尚未研究
- 代码和模型未开源
六、关键概念速查
| 术语 | 解释 |
|---|---|
| π₀.₅ | 基于 π₀ 的 co-trained VLA,通过异构数据源实现开放世界泛化 |
| Co-training | 在多个不同数据源(机器人数据、网络数据、语义标注)上联合训练 |
| MM | Mobile Manipulator,移动操作机器人数据(约 100 个家庭,400 小时) |
| ME | Multi-Environment,非移动臂在多样家庭中的数据 |
| CE | Cross-Embodiment,实验室多机器人跨具身数据 |
| HL | High-Level,语义子任务预测标注 |
| WD | Web Data,图像描述/VQA/物体定位等网络多模态数据 |
| VI | Verbal Instruction,人类专家用语言"遥控"的演示 |
| Hybrid Action | 同时用 FAST 离散 token 和 flow matching 连续动作训练 |
| Hierarchical Inference | 同一模型先输出子任务文本,再基于子任务输出动作 |
| Implicit HL | 训练中包含 HL 数据但不做显式高层推理的 baseline |
七、推理流程
┌──────────────────────────────────────────────────────────────┐
│ π₀.₅ 推理流程(单次动作生成) │
├──────────────────────────────────────────────────────────────┤
│ │
│ 输入: "clean the kitchen" + 4 摄像头图像 + 机器人状态 │
│ │
│ ┌─────────────────────────────────────────────────────┐ │
│ │ Step 1: 高层推理(自回归文本生成,~50ms) │ │
│ │ │ │
│ │ 模型观察场景 → 推理下一个子任务 │ │
│ │ 输出: rawtext = "pick up the plate on the counter" │ │
│ │ │ │
│ │ 调用频率:每 1 秒或任务完成时 │ │
│ └──────────────────────┬──────────────────────────────┘ │
│ │ │
│ ▼ │
│ ┌─────────────────────────────────────────────────────┐ │
│ │ Step 2: 低层推理(Flow Matching, ~73ms) │ │
│ │ │ │
│ │ 输入: rawtext + 腕部/前向图像 + 机器人状态 │ │
│ │ τ=0: 随机噪声 │ │
│ │ × 10 流匹配步: τ → τ+0.1 │ │
│ │ τ=1: 输出 50 步动作 chunk │ │
│ │ │ │
│ │ 调用频率:50Hz(通过 action chunking) │ │
│ └──────────────────────┬──────────────────────────────┘ │
│ │ │
│ ▼ │
│ 输出: 关节目标 + 夹爪 + 底盘速度 + 躯干升降 → PD 控制 → 执行 │
│ │
│ 高层 vs 低层: 同一个模型, 不同的输出模式 │
└──────────────────────────────────────────────────────────────┘
八、π₀ 系列发展脉络
π₀ (2024.10) π₀-FAST (2025.01) π₀.₅ (2025.04)
┌──────────────────┐ ┌──────────────────┐ ┌──────────────────────┐
│ 流匹配 VLA │ │ 自回归 + FAST │ │ Co-training 泛化 VLA │
│ PaliGemma 3B │ ───► │ DCT+BPE Tokenizer│ ───► │ 离散+连续混合训练 │
│ Action Expert │ │ 训练 5× 更高效 │ │ 异构数据源 (MM/ME/CE/ │
│ 10k hrs data │ │ 推理慢于 π₀ │ │ HL/WD/VI) │
│ 零样本+微调 │ │ 性能匹敌 π₀ │ │ 全新家庭泛化 │
└──────────────────┘ └──────────────────┘ │ 同模型高层+低层推理 │
└──────────────────────┘
笔记生成日期:2026-05-14